基于Stanley的车辆角度控制
角度误差\(\delta\)来源于两部分:
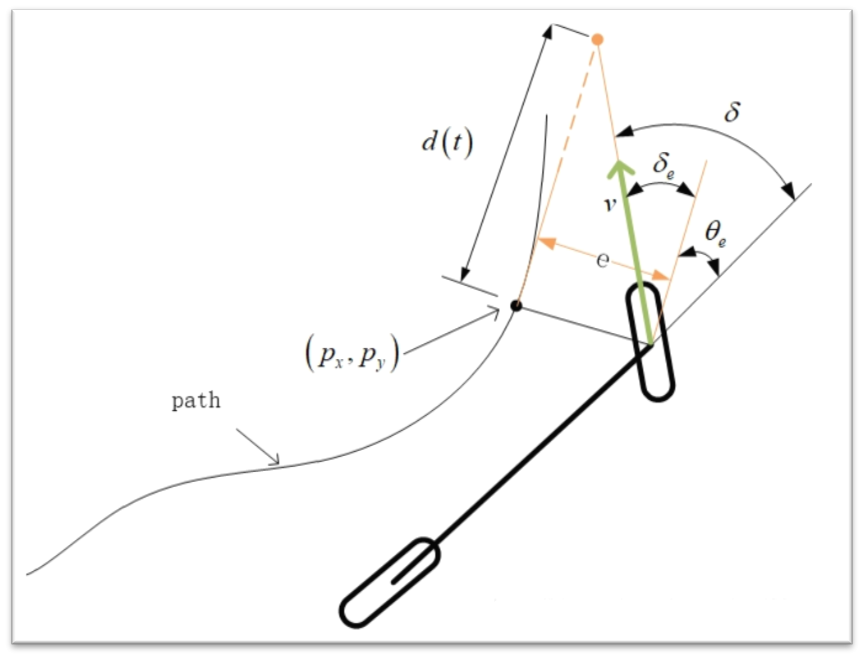
- 航向误差 \(\delta_{\theta_e}\):在不考虑横向跟踪误差的情况下,前轮偏角和给定路径切线方向一致,用\(\theta_e\)表示车辆航向与最近路径点切线方向之间的夹角,,在没有任何横向误差的情况下,前轮方向与所在路径点的方向相同:
\[
\delta_{\theta_e}(t) = \theta_e(t)
\]
- 横向偏差 \(\delta_e\):在不考虑航向跟踪偏差的情况下,横向跟踪误差越大,前轮转向角越大,假设车辆预期轨迹在距离前轮 \(d(t)\) 处与给定路径上最近点切线相交,根据几何关系得出如下非线性比例函数:
\[
\delta_e(t) = \arctan\frac{e(t)}{d(t)} = \arctan\frac{k\cdot e(t)}{v(t)}
\]
综合两方面控制因素,基本转向角控制率如下:
\[
\delta(t) = \theta_e(t) + \arctan\frac{k\cdot e(t)}{v(t)}
\]
对应代码如下
double lfAngleError = -atan2(
_midline[5][0]- _midline[4][0],
_midline[5][1] - _midline[4][1]
);
double lfDistance = \
_midline[0][0] < 0 ? length(_midline[0][0], _midline[0][1], 0, 0) :
-length(_midline[0][0], _midline[0][1], 0, 0);
double lfStanley_K;
circle Curve4Stanley = getR(
_midline[0][0], _midline[0][1],
_midline[10][0], _midline[10][1],
_midline[20][0], _midline[20][1]
);
if (Curve4Stanley.r < 50)
lfStanley_K = 11;
else if (Curve4Stanley.r < 100)
lfStanley_K = 7;
else
lfStanley_K = 3;
double lfDistanceError = atan(lfStanley_K * lfDistance / _speed);
*cmdSteer = constrain(-1, 1, lfAngleError + lfDistanceError);