安装
本页面提供了在 Windows 操作系统下安装和运行 CyberTorcs 的操作教程。
软硬件要求
- 硬件要求:
- CPU 最低频率:800MHz
- 最小内存:256MB
- 最小显存:64MB
- 磁盘空间:>1G
- 操作系统要求:Windows 10/XP
- 依赖库:OpenGL 1.3
-
开发环境(推荐):
-
集成开发环境(IDE):
- Visual Studio(版本:2010/2012/2013/2017/2019)
- CLion
-
代码编辑器:Visual Studio Code
-
相关资料:什么是编辑器和编译器,什么是集成开发环境?编译原理又是什么?
安装步骤
软件安装
-
下载canvas网站上提供的软件压缩包CyberTorcs_2025_v1.zip,解压至电脑。
-
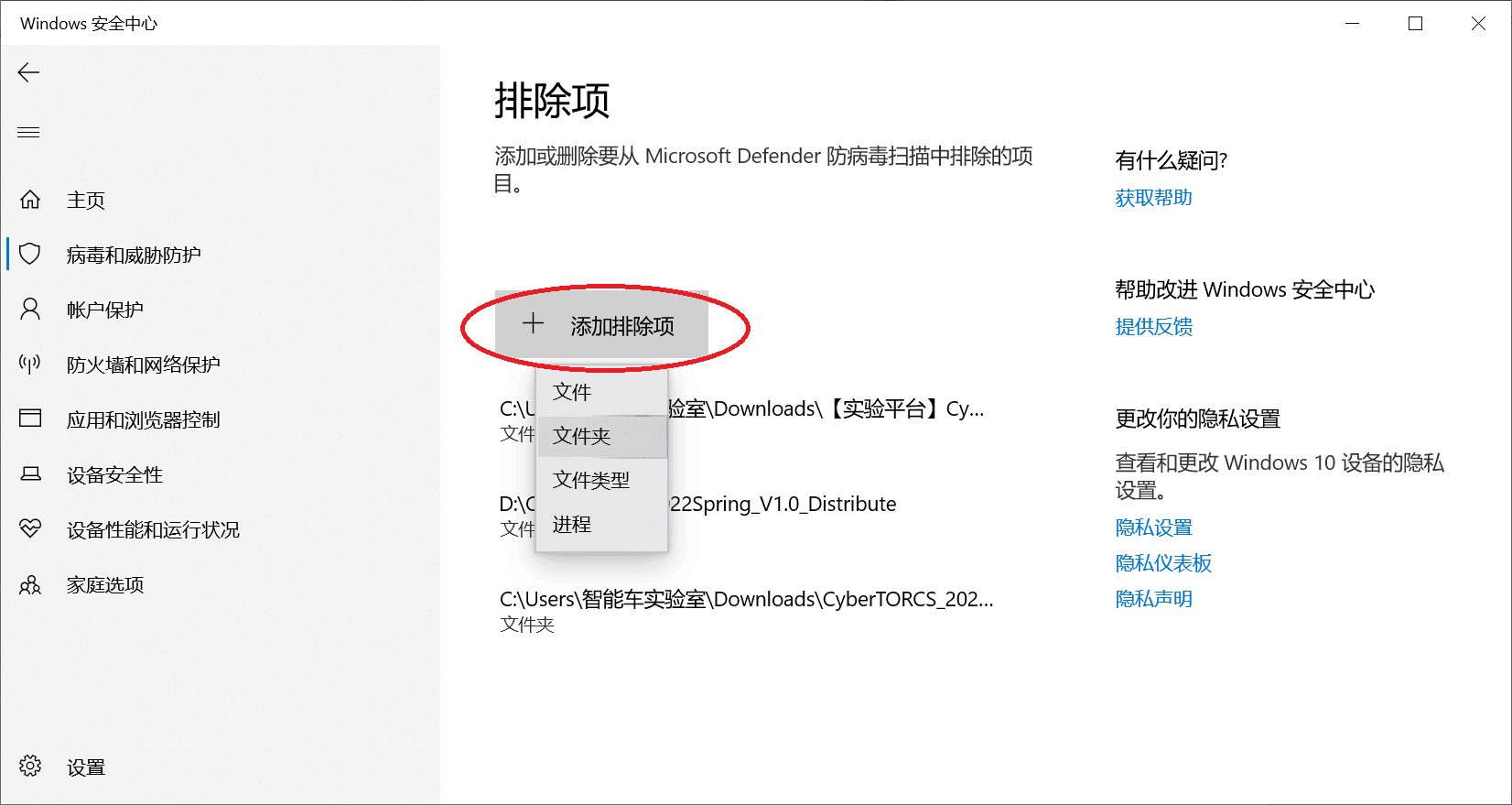
本软件需要搭配电子加密狗使用,初次运行软件前需要修改Windows安全设置。具体操作方法如下:
控制面板->更新与安全->Windows安全中心->病毒和威胁防护->管理设置->添加或删除排除项,将解压缩后的文件夹加入。


快速开始
安装 Visual Studio 集成开发环境
兼容性说明
CyberTorcs基于开源计算机视觉库 OpenCV 开发,由于开发时间较早,采用的是Win32的开发环境。由于OpenCV 高度依赖于C++语言编译器版本(以下将简称Visual Studio中C++语言编译器为VC编译器),而 OpenCv 官方团队从 Visual Studio 2015 (VC14) 开始不再支持 Win32,因此,如何在Visual Studio 2019 上兼容只在 Win32 模式下运行的 CyberTORCS,就成了平台兼容性最大的挑战。
目前该问题已通过在 Win32 模式下使用 Visual Studio 2019对 OpenCV进行源码编译解决。这个内测版本仅在 Visual Studio 2019 (VC16) 下可以使用。因此,最推荐的开发环境搭配为 Visual Studio 2019 + VC16 编译器。
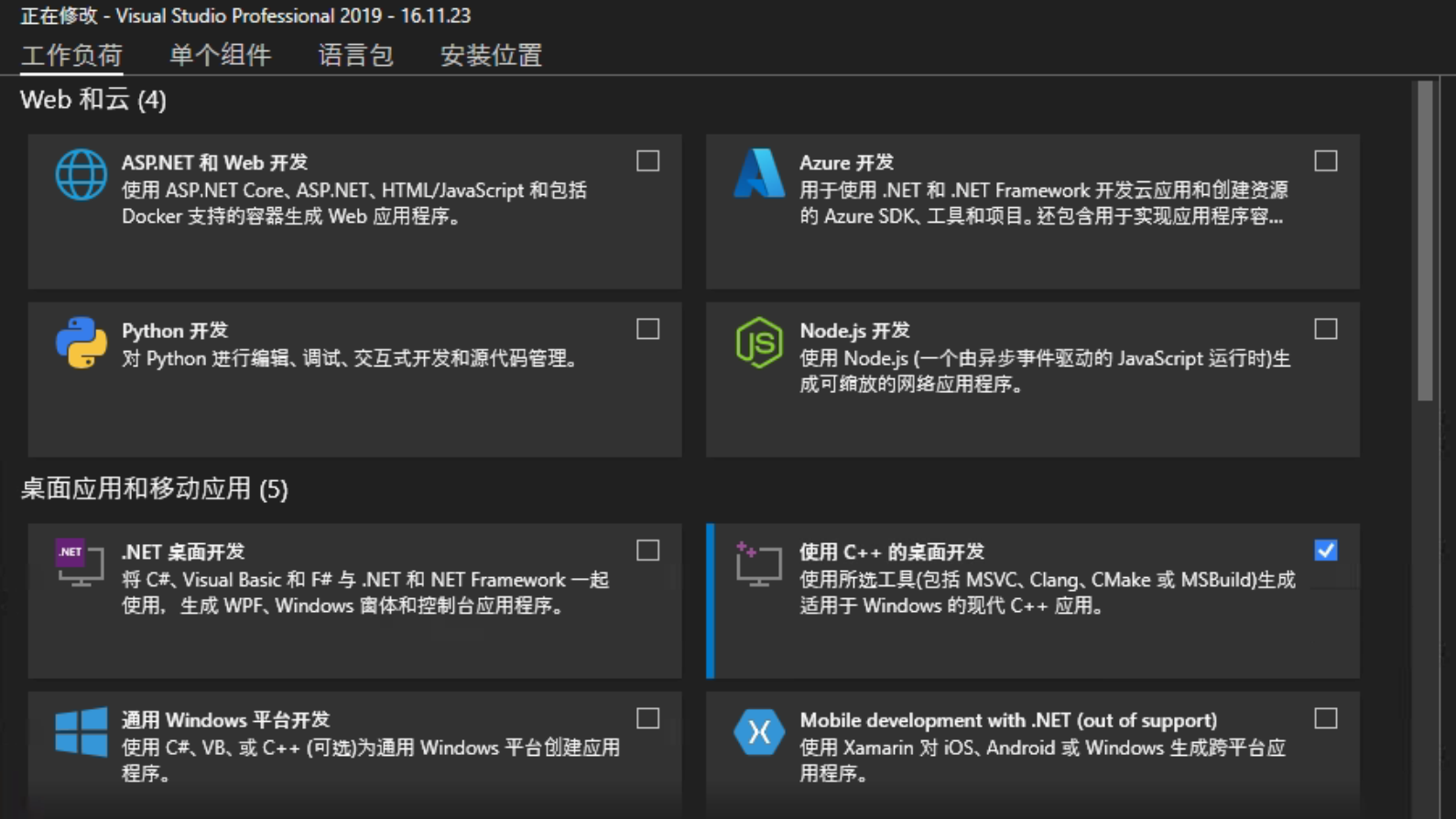
- 通过Visual Studio官网或交大云盘下载 VisualStudio 的安装引导文件;
- 双击打开 VisualStudio 安装引导文件,选择需要安装的开发工具,这里选择 使用 C++的桌面开发,然后安装。
运行软件
打开解压缩后得到的文件夹 CyberTorcs,进入runtime文件夹,直接运行 wtorcs.exe 。具体软件界面介绍请参考简介-设置菜单介绍。
编程步骤
以下以巡线任务为例,说明如何在CyberTorcs中使用自己编程的代码控制车辆运行。
- 下载课程网站提供的模板代码压缩包并解压。
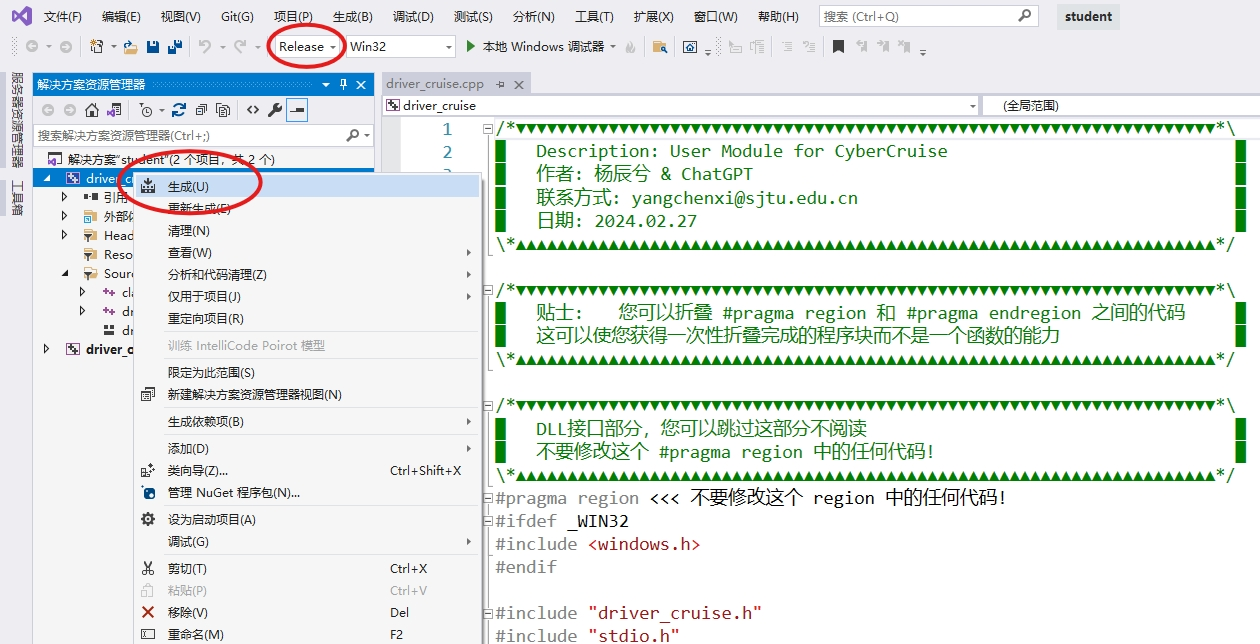
- 打开“学生端开发”文件夹,选择工程文件
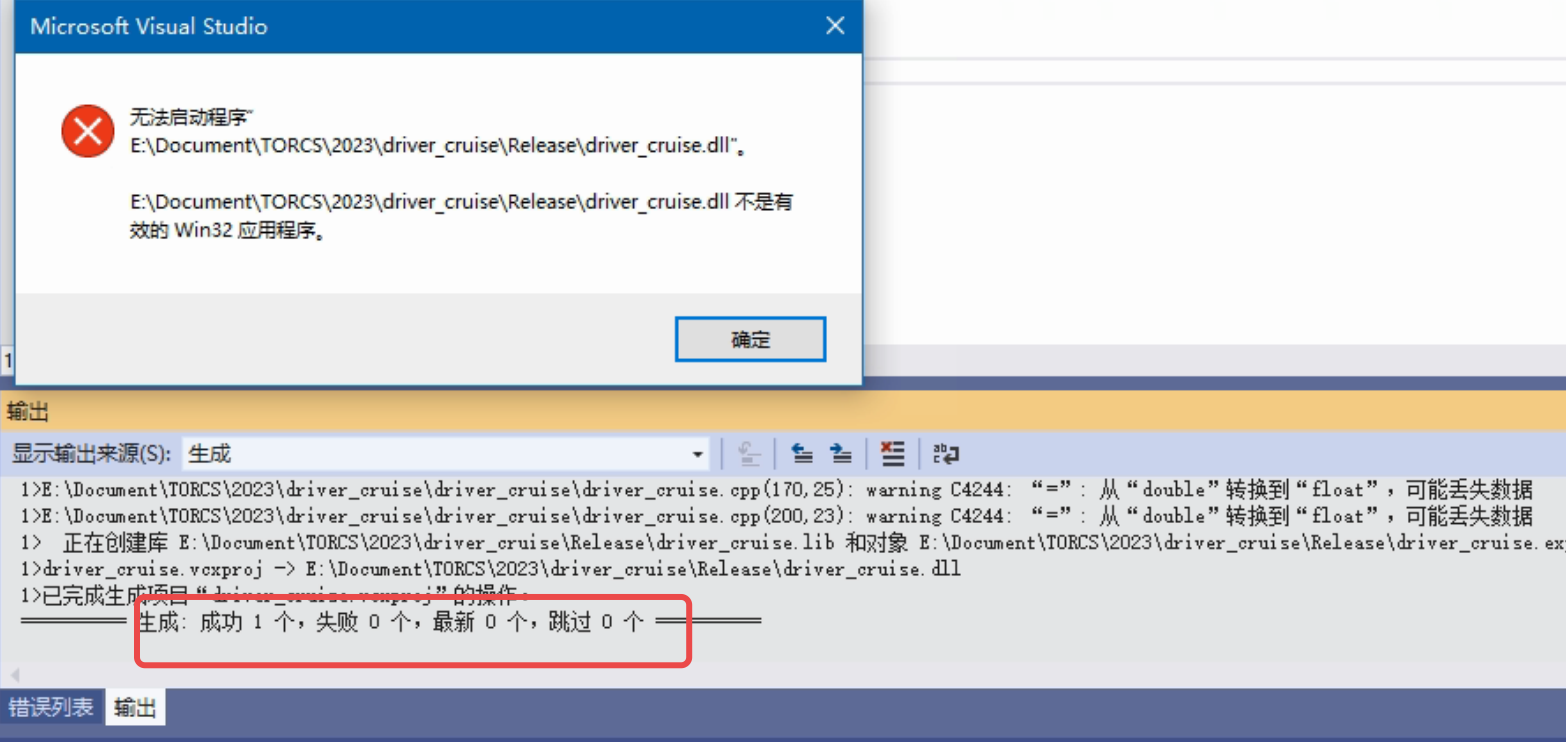
student.sln,右键选择通过 Visual Studio 打开; - 打开后确认编译方式为 Release,然后右键点击“driver_cruise”,点击”生成“进行编译;
- 成功编译时,命令行会提示 成功1个……。如果弹出窗口警告提示 无法启动程序 ,是因为生成的是 dll 文件,而不是可执行文件,系统无法直接执行编译生成的结果,该警告不会影响编译结果;
- 编译完成后,新生成的
.dll文件会自动出现在 CyberTorcs/runtime 文件夹下的 cybercruise 文件夹中; - 运行
wtorcs.exe,即可用自己的程序在CyberTorcs中控制车辆运行。
常见问题:初次编译失败
初次打开项目文件编译时可能会出现编译失败,命令行中提示 重定目标 的报错信息,按命令行给出的操作方法处理即可。
安装可视化工具
- 下载并解压可视化插件相关工具到电脑
-
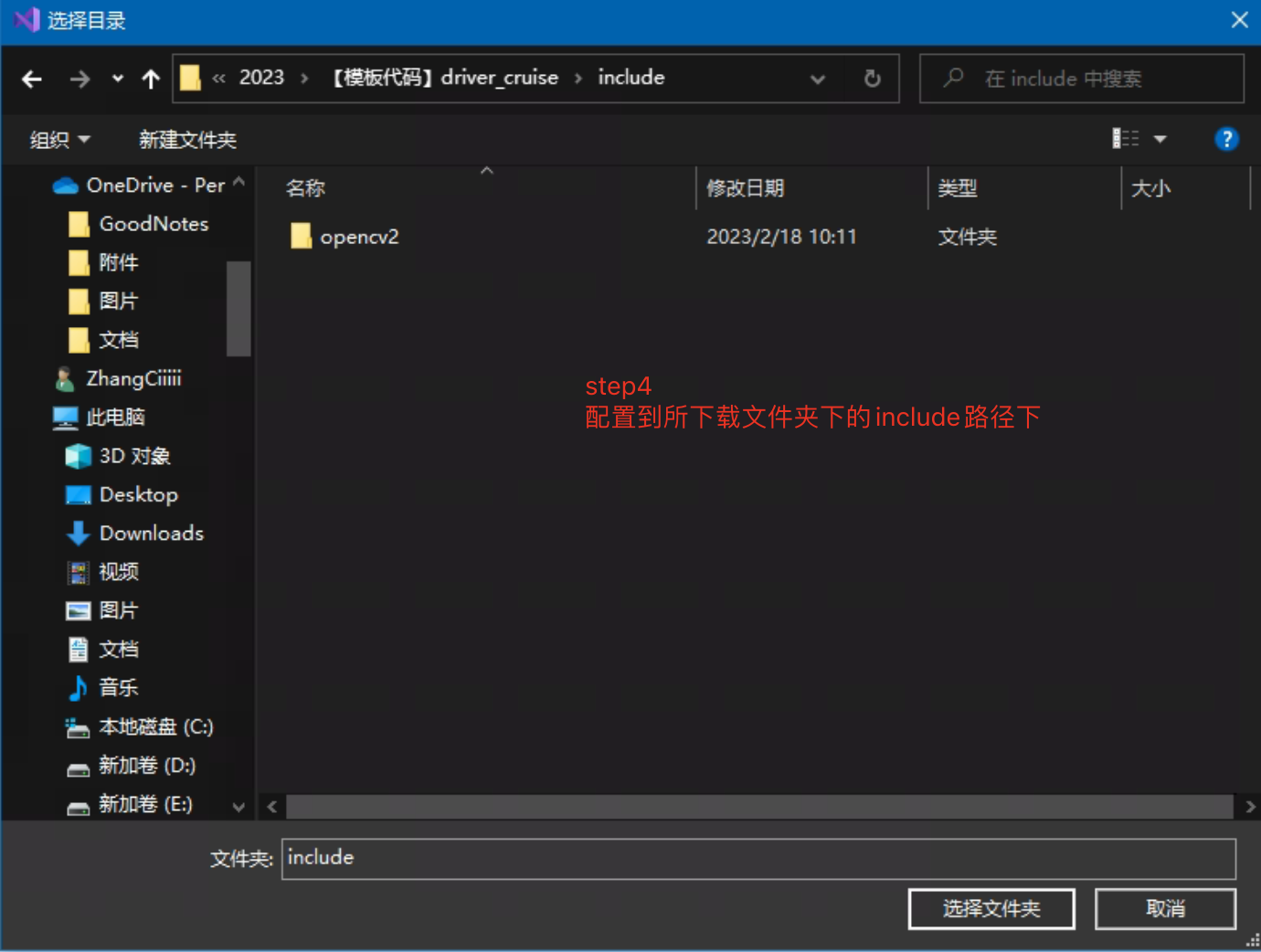
在Visual Studio中配置头文件目录和库文件目录
a. 打开属性设置配置include路径




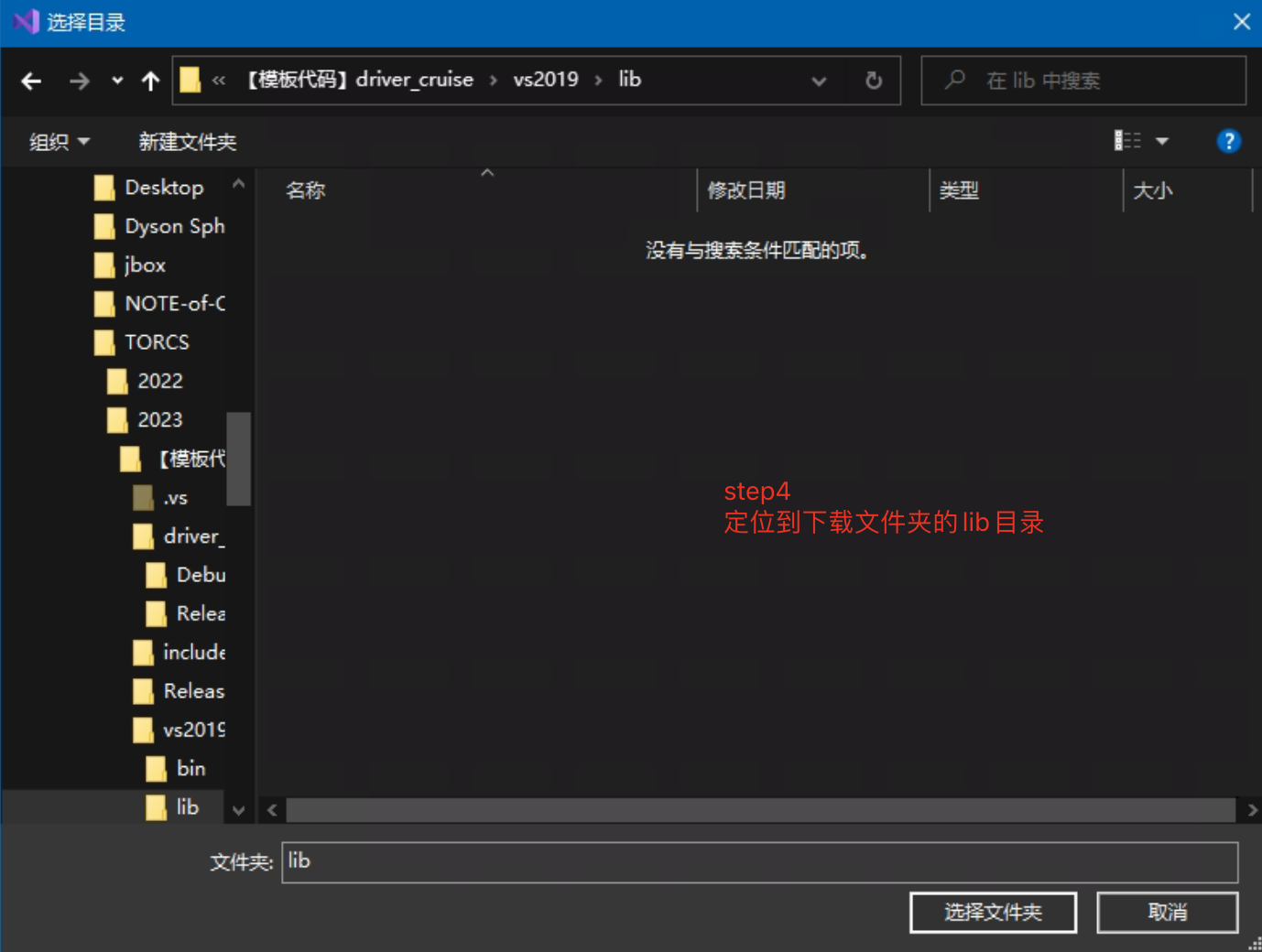
b. 配置库文件路径



-
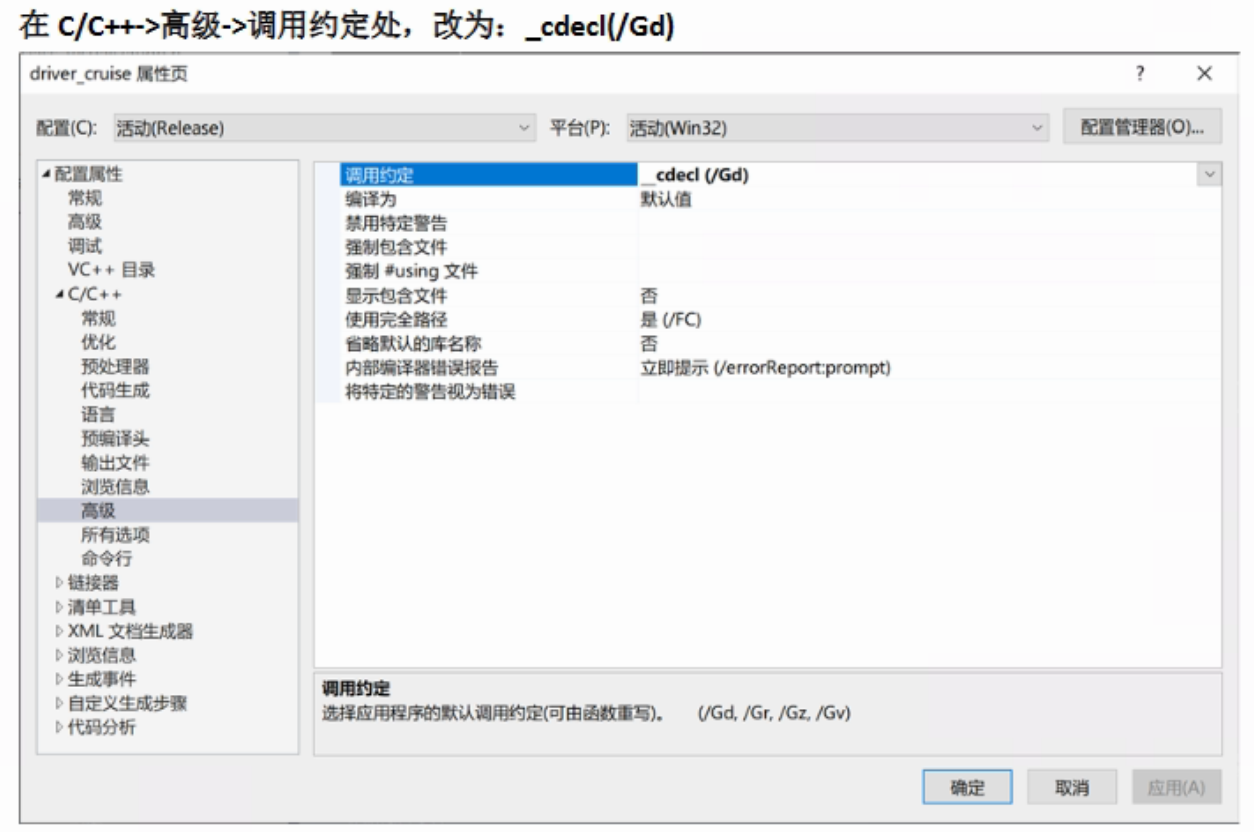
在vs中确认其他配置


-
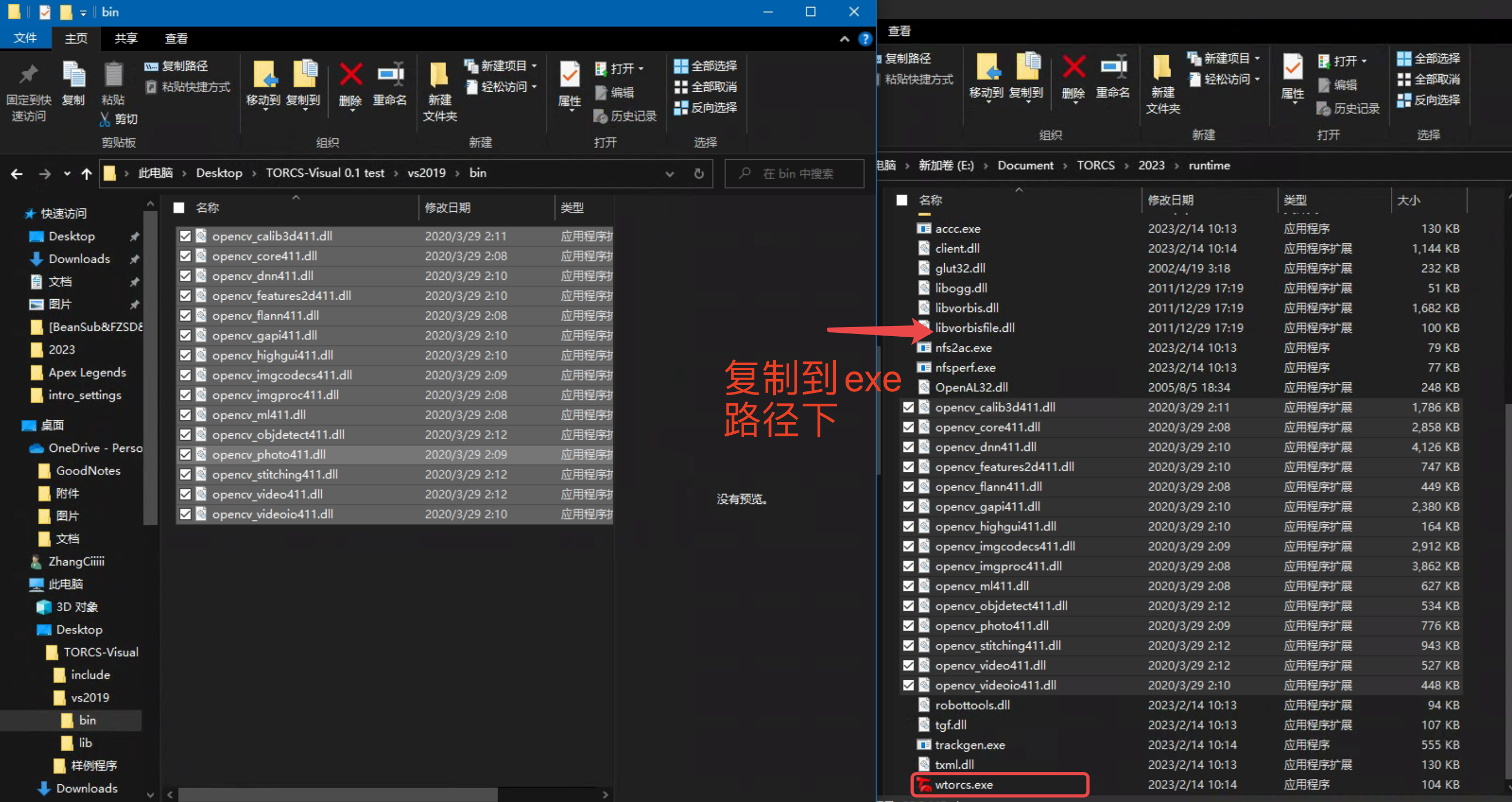
将可视化插件中的
.dll文件移动到torcs.exe文件的目录下