PID控制器
基本原理
PID控制器(比例-积分-微分控制器),由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)组成。可以透过调整这三个单元的增益来调定其特性。PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。
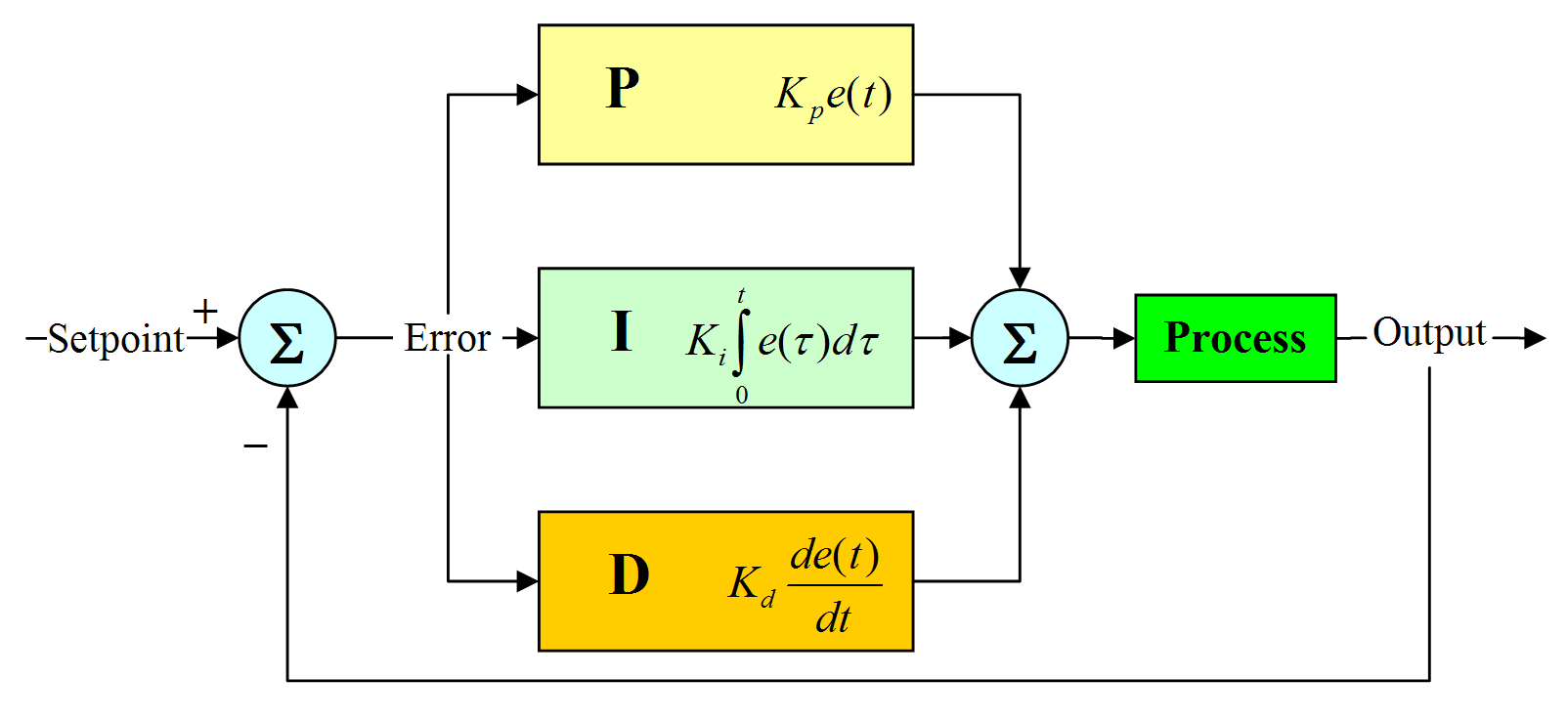
PID控制器中,比例单元基于当前反馈信号与期望值的误差计算;积分单元基于历史累积的误差计算,可以加速系统趋近设定值的过程,并且消除纯比例控制器会出现的稳态误差;微分单元基于误差的变化率计算,提升整定时间及系统稳定性。PID控制的具体实现方法是:根据反馈信号和期望值之间的差异,分别计算出比例、积分和微分三个量,然后对这三个量进行加权求和。若将\(u(t)\)记作控制输出,PID可以写成以下表达式:
\[
u(t) = K_p e(t) + K_i \int_0^t e(\tau)d\tau + K_d \frac{d}{dt}e(t)
\]
其中各变量含义为:
- \(K_p\): 比例增益系数;
- \(K_i\): 积分增益系数;
- \(K_d\): 微分增益系数;
- \(e\): 误差=设定值-真实值;
- \(t\): 当前时间;
- \(\tau\): 积分变数,数值从0到当前时间\(t\)。
PID控制器可以视为是频域系统的滤波器。在计算控制器最终是否会达到稳定结果时,此性质很有用。如果数值挑选不当,控制系统的输入值会反复振荡,这导致系统可能永远无法达到预设值。
PID控制器的一般转移函数是:
\[
H(s) = \frac{K_d s^2 + K_p s + K_i}{s+C}
\]
其中\(C\)是一个取决于系统带宽的常数。
PID控制器具有调节速度快、精度高、适应性强等优点,同时也存在参数调整困难、易受干扰等缺点。在实际应用中,需要根据不同的系统和应用需求,对PID控制器进行参数调整和优化,以获得最佳的控制效果。
调参技巧
PID控制器的控制效果和性能很大程度上取决于参数的调整。手动调整法是最简单和最基本的调参方法。该方法需要通过试错的方式,反复调整PID参数,观察输出响应、稳定性等指标,并根据调整结果不断优化参数,直到达到最佳控制效果。该方法虽然比较耗时,但对于简单的系统,效果较好。
具体步骤如下:
- 整定\(K_p\)
- 设置积分系数\(K_i=0\),微分系数\(K_d=0\),由小到大改变比例系数\(K_p\);
- 让扰动信号作阶跃变化,直到获得满意的控制过程(反应快、超调小);
- 整定\(K_p\)
- 取比例系数\(K_p=k * K_p, k \in [0.5, 0.8]\),由小到大增加积分系数\(K_i\);
- 让扰动信号作阶跃变化,直至求得满意的控制过程;
- 整定\(K_p\):积分系数\(K_i\)保持不变,改变比例系数\(K_p\),直到满意为止
- 重复以上试凑,直到找到满意的比例系数\(K_p\)和积分系数\(K_i\)为止;
- 整定\(K_d\):和前述步骤相同,直到控制过程满意为止。
| 调整方式 | 数值上升时间 | 超调量 | 安定时间 | 稳态误差 | 稳定性 |
|---|---|---|---|---|---|
| \(K_p \uparrow\) | 减少 | 增加 | 小幅增加 | 减少 | 变差 |
| \(K_i \uparrow\) | 小幅减少 | 增加 | 增加 | 大幅减少 | 变差 |
| \(K_d \uparrow\) | 小幅减少 | 减少 | 减少 | 变动不大 | 变好 |
PID控制的局限性
- 线性:PID控制器常见的问题是在于其线性且对称的特性,若应用在一些非线性的系统,其效果可能会有变化。
- 易扰动:微分器对量测或程序产生的高频噪声会有放大效果,因此在存在大量噪声时,输出会受到大幅度的扰动。