巡线任务
任务介绍
在CyberTorcs中,巡线任务被定义为让自控车辆沿着道路中线前进的任务,主要用于测试控制算法的精度和稳定性。
在具体实验过程中,一般会随机选取5~6条赛道,要求编写一套算法,能让自控车辆沿着赛道跑完全程,并记录运行过程中的一些物理量的数值,作为量化评价算法效果的指标。
评价规则
CyberTorcs在评价模型的巡线表现时,使用了以下定量表达式:
- 速度:使用单圈完成时间和碰撞损失之和表示
\[
\textrm{Total_T} = \textrm{Time} + \textrm{Damage} / 10
\]
- 精度:用车体偏离道路中线的偏差表示,在时间纬度上进行累积,为了去除距离的量纲除以车长
\[
\textrm{Total_E} = \textrm{Error} / \textrm{CarLength}
\]
总评分 \(\textrm{Total_T&E}\)为上述两个指标的加权求和,速度指标除以4是经验值。
\[
\textrm{Total_T&E} = \textrm{Total_T} / 4 + \textrm{Total_E}
\]
/* 以下为Total_E中Error的具体计算方式 */
float error = 0;
double midlineError = \
sqrt(midline[0][0] * midline[0][0] + midline[0][1] * midline[0][1]);
error += abs(midlineError) + \
abs((abs((carLength / 2.0) * tan(yaw)) + (carWidth / 2.0)) / cos(yaw)) - \
(carWidth / 2.0);
接口定义
控制模型的输入变量
| 变量 | 说明 |
|---|---|
float midline[k][2] |
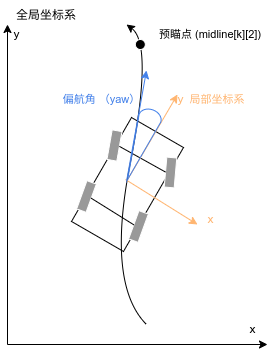
预瞄点,沿道路中线 k 米处的相对于当前车辆坐标系的坐标值。 例如,( midline[10][0], midline[10][1]) 表示沿道路中线前方10米处的点相对于当前车辆坐标系的 (x,y) 坐标, 考虑到实际感知技术的极限,目前设定 k <= 200。 |
float yaw |
偏航角(弧度),指车头朝向与车辆中心到道路中心线最近点的切线的夹角。 |
float yawrate |
角速度(弧度/秒) |
float speed |
车速(公里/小时) |
float acc |
加速度(米/秒2) |
float width |
道路宽度(米) |
float gearbox |
档位,选项 {0, 1, 2, 3, 4, 5, 6},0为空挡。 |
float rpm |
发动机转速(转/分钟) |
控制模型的输出变量
| 变量 | 说明 |
|---|---|
float *cmdAcc |
油门控制,范围 [0.0, 1.0],0.0 表示不踩油门,1.0表示踩满油门。 |
float *cmdBrake |
刹车控制,范围 [0.0, 1.0],0.0 表示不踩刹车,1.0表示踩满刹车。 |
float *cmdSteer |
转向控制,范围 [-1.0, 1.0],-1.0 表示方向盘向右打满,1.0表示方向盘向左打满。 |
float *cmdGear |
变速箱档位,选项 {0, 1, 2, 3, 4, 5, 6},0为空挡。 |