泊车任务
任务简介
泊车速度越快越好
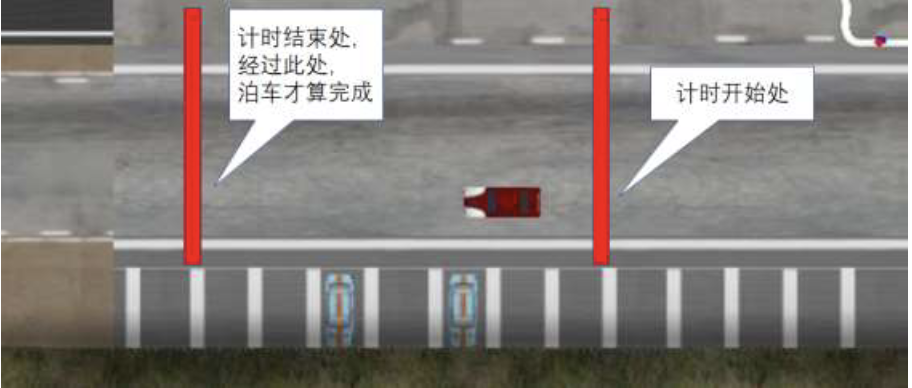
- 起点:某固定里程
- 检验:泊位完毕标志
- 终点:某固定里程
- 泊车精度越高越好
- 泊车朝向精度要求<10°,超出则失败,失败得分999 - 泊车精度定义:车辆四个角点偏差距离之和
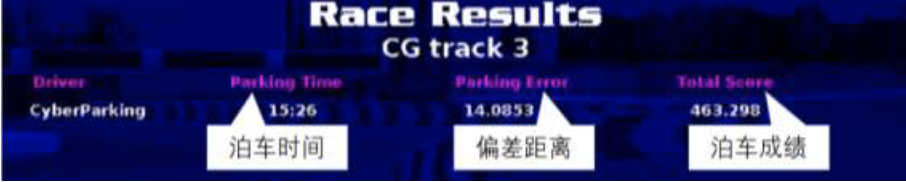
成绩计算方法:泊车时间 x (1 + 10x偏差距离和/车宽)
详细说明
泊车设置
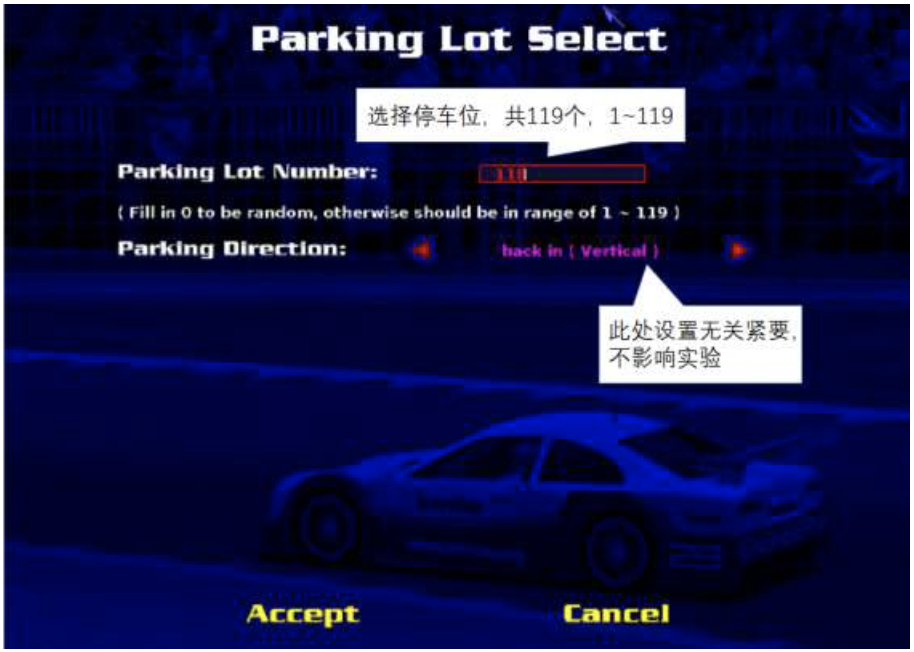
泊车流程
- 入库
- 示意停稳:置bFinish = 1(泊车停稳时置bFinish=1,告知系统车已停稳,请求系统记录数据以备后续计算泊车精度使用。如果此时速度>0.2km/h,泊车失败)
- 出库
详细规则
- 将车泊入绝对坐标为(lotX, lotY)的车位,前面路段用巡线方法开
- 成绩计算:泊车时间 (1+10偏差距离/车长)。偏差距离:车辆四个顶点偏差距离之和。泊车时间:如下图所示,两个计时点时间相减。
- 泊车时不得与旁边两辆车发生碰撞,也不得与栏杆碰撞。当damage值>1时会直接退出显示“ Your damage is too large!”,龙套车不受该规则影响。
- 没有置bFinished位比赛就结束或者没有到达规定里程(即开始计时的里程)就置位,会显示“Failed! Haven't startingparking!”
- 置位bFinished时车体速度大于0.2 km/h (注意单位),会显示“ Failed! Your speed is too fast whenparking!”
- 最后车体的航向角所在直线和提供的lotAngle所在直线的夹角超过10度(注意单位),会显示“Failed! Your car yaw is not accurateenough!”
- 过两个计时点要求正向通过,极限位置如下图(a)所示
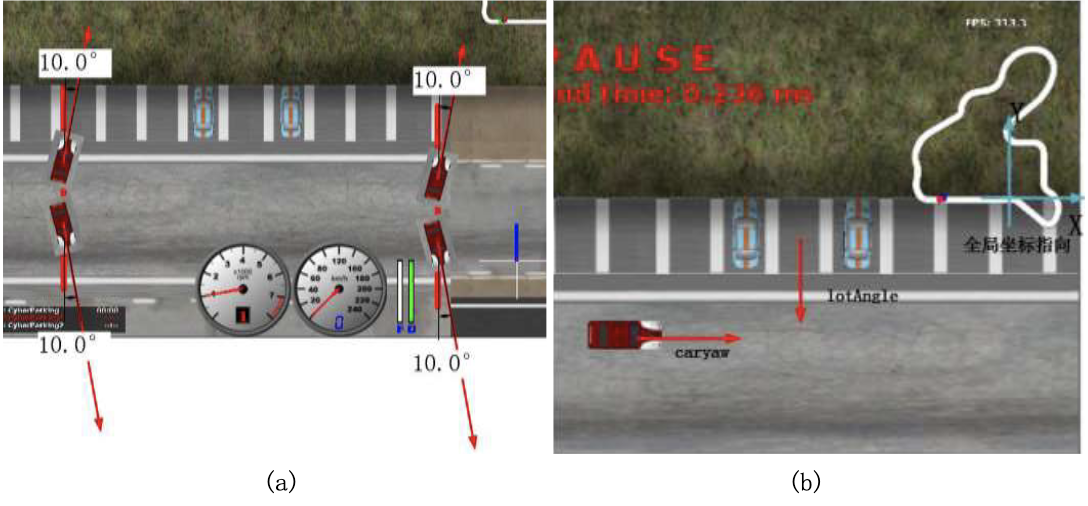
- 泊车入库可以车头入库也可以车尾入库
- 所有车位的指向均由车库中心指向道路10.全局坐标指向如上图(b)所示
接口定义
相比于巡线任务,泊车任务新增了以下参数用于完成泊车操作:
控制模型的输入变量
对下述变量不理解的同学可以将变量输出到终端,查看数据的变化从而理解具体的意义。
| 变量 | 说明 |
|---|---|
_lotX |
车位中心的X坐标, |
_lotY |
车位中心的Y坐标, |
_lotAngle |
车位方向 |
_carX |
车辆当前的X坐标 |
_carY |
车辆当前的Y坐标 |
_caryaw |
车身方向 |
控制模型的输出变量
| 变量 | 说明 |
|---|---|
bFinished |
完成停车判定符,用户完成停车后将该变量置为true,系统以此时刻车辆状态计算泊车误差。 |
运行教程
整体流程与巡线任务一致:
step 1:在release模式下编译代码,在release文件夹下找到dll文件。
step 2:将dll文件复制到cyberparking文件夹下。

模板代码简介
模板代码将整个泊车环节分为以下流程:
| 变量 | 说明 |
|---|---|
StageApproaching |
车辆在道路行驶接近车位, |
StageKeepRight |
车辆靠右行驶, |
StageTurnLeft |
车辆向左转调整方向 |
StageEnterLot |
车辆进入车位 |
StageLeaveLot |
车辆离开车位 |
StageBackToRoad |
车辆返回道路 |
StageLeave |
车辆继续在道路行驶 |
在 'userDriverSetParam' 函数中,根据车辆与车位的状态关系,确认车辆在哪个泊车流程,用switch case 语句,使车辆在不同的流程下使用相应的控制参数。